电动执行器
电动执行器与气动执行器一样,是控制系统中的一个重要部分。它接收来自控制器的0~10 mA或4~20mA的直流电流信号,并将其转换成相应的角位移或直行程位移,去操纵阀门、挡板等控制机构,以实现自动控制。
电动执行器有角行程、直行程和多转式等类型。角行程电动执行机构以电动机为动力元件,将输入的直流电流信号转换为相应的角位移(0°~90°),这种执行机构适用于操纵蝶阀、挡板之类的旋转式控制阀。直行程执行机构接收输入的直流电流信号后,使电动机转动,然后经减速器减速并转换为直线位移输出,去操纵单座、双座、三通等各种控制阀和其他直线式控制机构。多转式电动执行机构主要用来开启和关闭闸阀、截止阀等多转式阀门,由于它的电机功率比较大,最大的有几十千瓦,一般多用作就地操作和遥控。
几种类型的电动执行机构在电气原理上基本上是相同的,只是减速器不一样。以下简单介绍一下角行程的电动执行机构。
角行程电动执行机构主要由伺服放大器、伺服电动机、减速器、位置发送器和操纵器组成,如图5-2-1所示。其工作过程大致如下:伺服放大器将由控制器来的输入信号与位置反馈信号进行比较,当无信号输入时,由于位置反馈信号也为零,放大器无输出,电机不转;如有信号输入,且与反馈信号比较产生偏差,使放大器有足够的输出功率,驱动伺服电动机,经减速后使减速器的输出轴转动,直到与输出轴相连的位置发送器的输出电流与输入信号相等为止。此时输出轴就稳定在与该输入信号相对应的转角位置上,实现了输入电流信号与输出转角的转换。
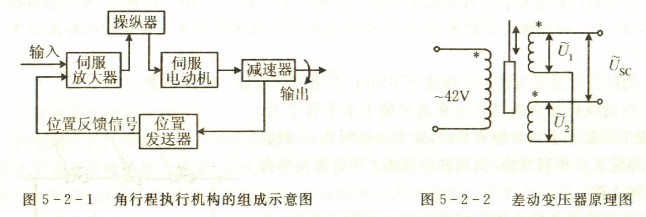
位置发送器是能将执行机构输出轴的位移转变为0~10mADC(或4~20mADC)反馈信号的装置,它的主要部分是差动变压器,其原理如图5-2-2所示。
在差动变压器的原边加一交流稳压电源后,其副边分别会感应出交流电压U1,U2,由于两副边绕组匝数相等,且反向串联,故感应电压Usc的大小将取决于铁心的位置。
铁心的位置是与执行机构输出轴的位置相对应的。当铁心在中间位置时,因两副边绕组的磁路对称,故在任一瞬间穿过两副边绕组的磁通都相等,因而感应电压U12=U2。但因两绕组反向串联,它们所产生的电压互相抵消,因而输出时电压Usc等于零。
当铁心自中间位置有一向上的位移式,使磁路对两绕组不对称,这时上边绕组中交变磁通的幅值将大于下面绕组中交变进通的幅值,两绕组中的感应电压将是U1>U2,因而有输出电压Usc=U1-U2产生。
反之,当铁心下移时,两电压的关系将是U2>U1,此时输出电压的相位与上述相反,其大小为Usc=U1-U2。
信号氏,经过整流、滤波电路可以得到0~10 mA(或4~20mA)的直流电流信号,它的大小与执行机构输出位移相对应。这个信号被反该到伺服放大器的输入端,以与输入信号相比较。
电动执行机构不仅可与控制器配合实现自动控制,还可通过操纵器实现控制系统的自动控制和手动控制的相互切换。当操纵器的切换开关工于手动操作位置时,由正、反操作按钮直接控制电机的电源,以实现执行机构输出轴的正转或反转,进行遥控手动操作。
本文来自:
产品中心 http://www.360abg.com/products/